

【導(dǎo)讀】在很多應(yīng)用中,都需要用到能夠為負載提供適當功率的放大器;另外還需保持良好的直流精度,而負載的大小決定了目標電路的類型。精密運算放大器能驅(qū)動功率要求不足50 mW的負載,而搭配了精密運算放大器輸入級和分立功率晶體管輸出級的復(fù)合放大器可以用來驅(qū)動功率要求為數(shù)W的負載。 但是,在中等功率范圍內(nèi)卻沒有優(yōu)秀的解決方案。 在這個范圍內(nèi),不是運算放大器無法驅(qū)動負載,就是電路過于龐雜而昂貴。
最近在設(shè)計惠斯登電橋驅(qū)動器時,這種兩難處境更為明顯。激勵電壓直接影響失調(diào)和范圍,因此需要具有直流精度。這種情況下,源極電壓和電橋之間的容差不足1 mV。 若以7 V至15 V電源供電,則電路必須以單位增益將電橋從100 mV驅(qū)動至5 V。
使問題變得更為復(fù)雜的是,它能使用各種不同的橋式電阻 例如,應(yīng)變計的標準阻抗為120 Ω或350 Ω。若采用120 Ω電橋,則放大器必須提供42 mA電流,才能保持5 V電橋驅(qū)動能力。 此外,電路驅(qū)動能力必須高達10 nF。 這是考慮電纜和電橋耦合電容后得到的數(shù)值。
放大器選擇
設(shè)計該電路的第一步,是選擇可以驅(qū)動負載的放大器。 其壓差(VOH) 在目標負載電流情況下,必須位于電路的可用裕量范圍內(nèi)。 針對該設(shè)計的最小電源電壓為7 V,最大輸出為5 V。若裕量為250 mV,則可用裕量(VDD – VOUT)等于1.75 V。目標負載電流為42 mA。
精密、雙通道運算放大器 ADA4661-2 具有軌到軌輸入和輸出特性。 該器件的大輸出級可驅(qū)動大量電流。 源電流為40 mA時,數(shù)據(jù)手冊中的壓差電壓規(guī)格為900 mV,因此可輕松滿足1.75 V裕量要求。
壓差限制了電路采用低壓電源工作,而功耗則限制了電路采用高壓電源工作。 可計算芯片升溫,確定最大安全工作溫度。 MSOP封裝簡化了原型制作,但LFCSP封裝的熱性能更佳,因此如有可能應(yīng)當采用LFCSP封裝。 MSOP的熱阻(θJA) 等于142°C/W,LFCSP的熱阻等于83.5°C/W。 最大芯片升溫可通過將熱阻乘以最大功耗計算得到。 當電源為15 V且輸出為5 V時,裕量為10 V。最大電流為42 mA,因此功耗為420 mW。 最終的芯片升溫(MSOP為60°C,LFCSP為35°C)限制最大環(huán)境溫度為65°C (MSOP)以及90°C (LFCSP)。
為保持精確的電橋激勵電壓,芯片和封裝的組合熱性能同樣十分重要。 不幸的是,驅(qū)動大輸出電流時,某些運算放大器的性能下降明顯。 輸出級功耗使得芯片上的溫度梯度極大,從而導(dǎo)致匹配晶體管和調(diào)節(jié)電路之間的不平衡。 ADA4661-2設(shè)計用于驅(qū)動大功率,同時抑制這些溫度梯度。
反饋環(huán)路穩(wěn)定
滿足負載-電容規(guī)格不容易,因為大部分運算放大器在不使用外部補償?shù)那闆r下無法驅(qū)動10 nF的容性負載。 驅(qū)動大容性負載的一種經(jīng)典技巧,是使用多個反饋拓撲,如圖1所示。圖中隔離電阻RISO將放大器輸出和負載電容CLOAD隔離。 將輸出信號 VOUT 通過反饋電阻 RF進行回送,便能保持直流精度。 通過電容 CF反饋放大器輸出,可保持環(huán)路穩(wěn)定性。
如需使該電路有效,RISO 必須足夠大,以便總負載阻抗在放大器的單位增益頻率下表現(xiàn)出純阻性。 這是很困難的,因為該電阻上會有電壓下降。 通過分配最差情況下的剩余電壓裕量,可確定RISO 的最大值。 6.75 V電源以及5 V輸出允許1.75 V總壓差。 放大器 VOH 占用總壓差的900 mV,因此電阻上的壓降最高允許達到850 mV。 如此,便可將RISO 的最大值限制為20 Ω。2 nF負載電容在該放大器的單位增益交越頻率4 MHz處產(chǎn)生一個極點。 顯然,多反饋無法滿足該要求。
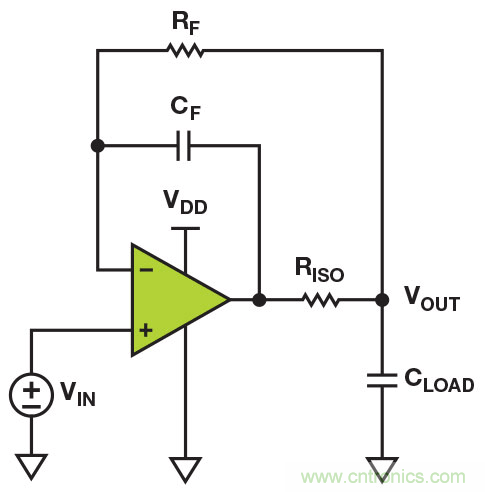
圖1. 多反饋拓撲
另一種穩(wěn)定重載緩沖器的方法是使用混合單位跟隨器拓撲,如圖2所示。這種方法通過降低反饋系數(shù),強迫反饋環(huán)路在較低頻率處發(fā)生交越,而非嘗試移除負載-電容形成的極點。 由于存在負載極點,因此會產(chǎn)生過多相移;通過強迫環(huán)路在發(fā)生過多相移之前完成交越,便可實現(xiàn)電路穩(wěn)定性。
T反饋系數(shù)是噪聲增益的倒數(shù),因此人們可能得出結(jié)論,認為這種方法擯棄了采用單位增益信號的原則。 若電路采用傳統(tǒng)反相或同相配置,那么這種觀點是正確的。但若對原理圖作深入考察,便會發(fā)現(xiàn)兩個輸入均被驅(qū)動。 分析該電路的一種簡便方法是將 –RF/RS 反相增益與 (1 + RF/RS)同相增益相疊加。 這樣便可得到以+1信號增益以及 (RS + RF)/RS噪聲增益工作的電路。 針對反饋系數(shù)和信號增益的獨立控制允許該電路穩(wěn)定任何大小的負載,但代價是電路帶寬。
然而,混合單位跟隨器電路具有某些缺點。 第一個問題是,噪聲增益在所有頻率下都很高,因此直流誤差(如失調(diào)電壓,VOS) 通過噪聲增益而放大。 這使得滿足直流規(guī)格的任務(wù)變得尤為艱難。 第二個缺點需對放大器的內(nèi)部工作原理有一定了解。 該放大器具有三級架構(gòu),采用級聯(lián)式米勒補償。 輸出級有自己的固定內(nèi)部反饋。 這使得外部反饋環(huán)路有可能實現(xiàn)穩(wěn)定,同時使輸出級反饋環(huán)路變得不穩(wěn)定。
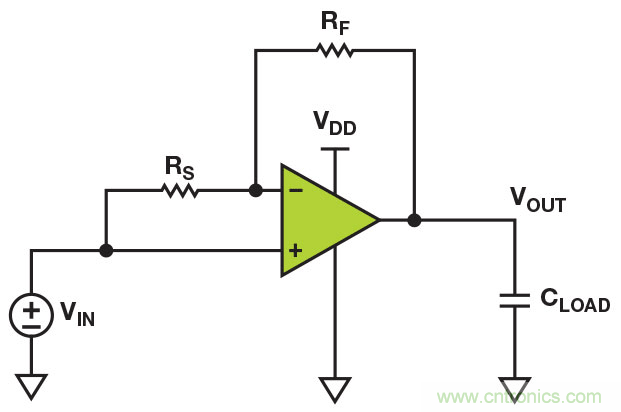
圖2. 混合單位跟隨器拓撲
通過將兩個電路的工作原理相結(jié)合,便可解決這兩個缺點,如圖3所示。多反饋分隔低頻和高頻反饋路徑,并加入了足夠多的容性負載隔離,從而最大程度減少輸出級的穩(wěn)定性問題。 利用電橋電壓,通過反饋電阻 RF. 驅(qū)動低頻反饋。 利用放大器輸出,通過反饋電容 CF驅(qū)動高頻反饋。
在高頻時,電路還表現(xiàn)為混合單位跟隨器。 高頻噪聲增益由電容阻抗確定,數(shù)值等于 (CS + CF)/CF.該噪聲增益允許反饋環(huán)路在一個足夠低的頻率上完成交越,而負載電容不會降低該頻率處的穩(wěn)定性。 由于低頻噪聲增益為單位增益,因此可保持電路的直流精度。
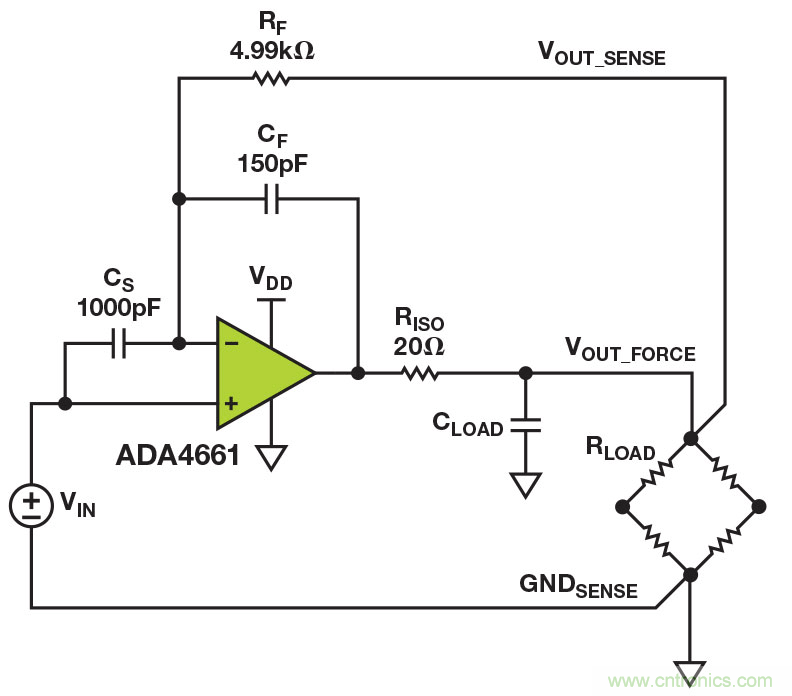
圖3. 電橋驅(qū)動器原理圖
保持直流精度要求十分留意信號走線,因為電路中存在大電流。 從42 mA的最大負載電流中,僅需7 mΩ 即可產(chǎn)生300 µV壓降;該誤差已相當于放大器的失調(diào)電壓。
解決這個問題的一種典型方法是使用 4線開爾文連接,利用兩個載流連接(通常稱為"強制")驅(qū)動負載電流,另外兩線為電壓測量連接(通常稱為"檢測")。 檢測連接必須盡可能靠近負載,以防任何負載電流流過。
對于橋式驅(qū)動器電路而言,檢測連接應(yīng)在電橋的頂部和底部直接實現(xiàn)。 在負載和檢測線路之間不應(yīng)共享任何PCB走線或線纜。 GNDSENSE連接應(yīng)當經(jīng)路由后回到電壓源 VIN。 例如,假設(shè)激勵為DAC,則 GNDSENSE 應(yīng)當連接DAC的REFGND。電橋的GNDFORCE 連接應(yīng)當具有專用的走線并一路連接回到電源,因為允許橋式電流流過接地層將產(chǎn)生不必要的壓降。
誤差預(yù)算
該電路的直流誤差預(yù)算如表1所示,主要由放大器的失調(diào)電壓和失調(diào)電壓漂移所決定。 它假定工作條件處于最差情況范圍內(nèi)。 總誤差滿足1 mV要求,并大幅優(yōu)于該要求。
表1. 誤差預(yù)算
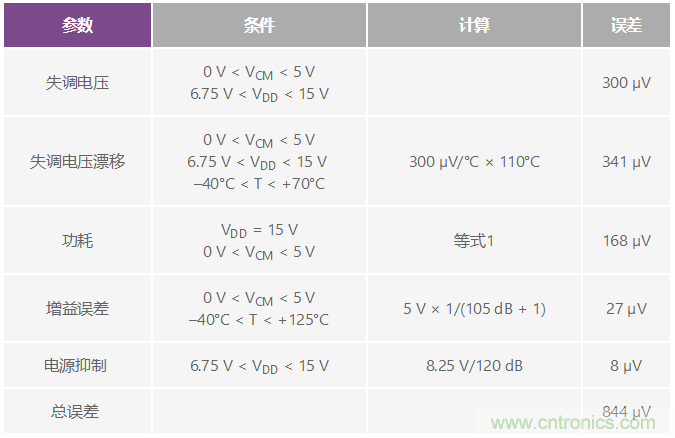
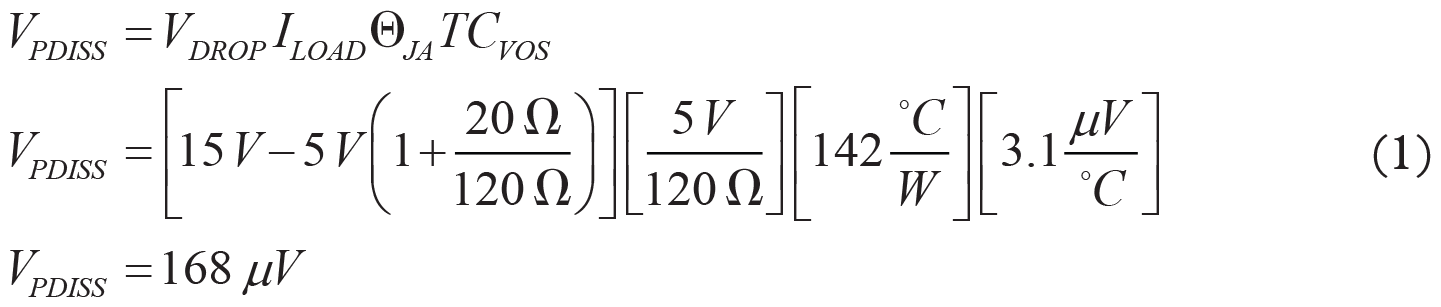
表中的第三項表示功耗誤差。 放大器功耗會增加芯片溫度,因此與環(huán)境溫度下的無負載電流情況相比,失調(diào)電壓產(chǎn)生漂移。 最差情況下的誤差計算采用最高電源電壓、最高輸出電壓以及最低阻性負載,如等式1所示。注意,放大器上的最差情況壓降通過 RISO電阻得以部分降低。
直流測量結(jié)果
誤差電壓等于輸入電壓 VIN, 和負載電壓 VOUT之差。 圖4顯示原型電路的誤差電壓與負載電壓的關(guān)系。 橋式驅(qū)動器電路中的最大誤差源是失調(diào)電壓和失調(diào)電壓漂移。 由于放大器功耗而產(chǎn)生的額外誤差與橋式電壓有關(guān)。 電源電壓對功耗的影響可從不同顏色的曲線中看出來。 黑色曲線功耗最低(50 mW),電源電壓最小(7 V)。 芯片僅升溫7°C,因而該曲線代表室溫失調(diào)電壓與該器件共模電壓的關(guān)系。
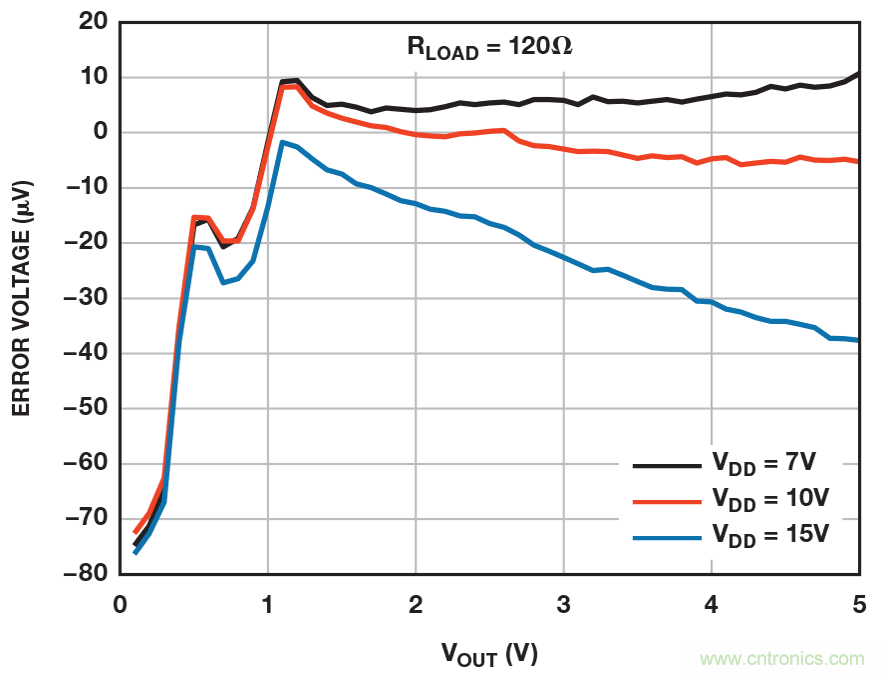
圖4. 誤差電壓與輸出電壓的關(guān)系
色(10 V)和藍色(15 V)曲線分別代表175 mW最大功耗和385 mW最大功耗下的性能。 隨著輸出電壓的上升,額外的功耗使芯片升溫25°C至55°C,導(dǎo)致失調(diào)電壓發(fā)生漂移。 該額外熱誤差曲線形狀為拋物線形,因為當 VOUT 為 VDD一半時,具有最大功耗。
電源在很大程度上依賴失調(diào)電壓,這表示應(yīng)當考慮該電路的電源抑制。 圖5顯示掃描電源電壓并固定輸出電壓時的誤差電壓。 黑色曲線表示輕載情況,此時放大器電源抑制(PSR)起主要作用。 就該器件而言,10 µV變化表示118 dB PSR。 紅色和藍色曲線顯示輸出消耗額外功耗(由于負載為350 Ω和120 Ω典型橋式電阻)的結(jié)果。紅色和藍色曲線的有效PSR分別為110 dB和103 dB。
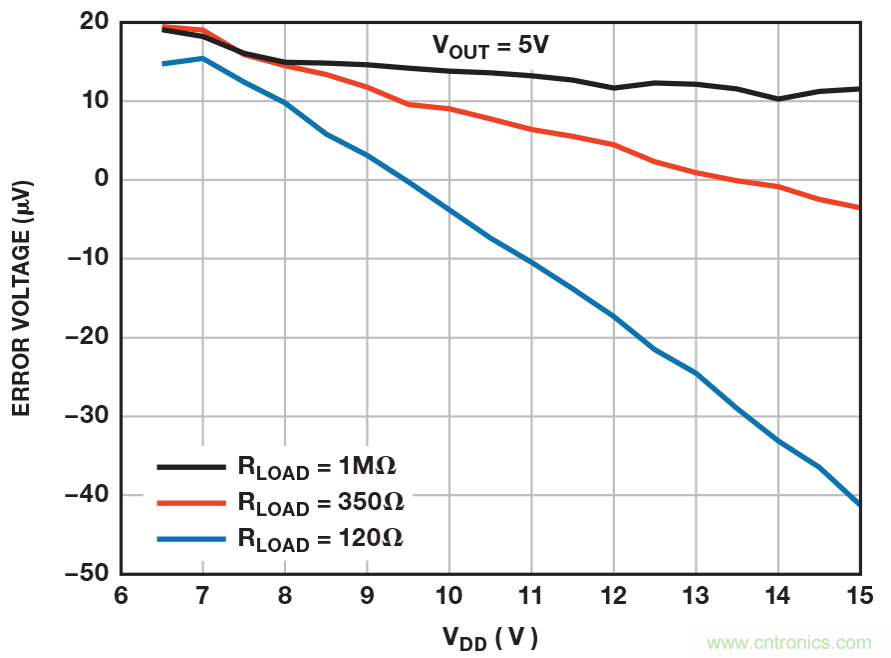
圖5. 誤差電壓與電源電壓的關(guān)系
該電路性能顯然取決于失調(diào)漂移與溫度的關(guān)系。目前為止,在所有與溫度有關(guān)的誤差計算中均采用了TCVOS 規(guī)格。 需要為該假設(shè)找到合理的解釋,因為芯片溫度由于放大器功耗與環(huán)境溫度的改變有所不同而上升。 前者在芯片表面形成較大的溫度梯度,影響放大器的微妙平衡。 這些梯度會使失調(diào)電壓漂移相比數(shù)據(jù)手冊規(guī)格而言要差得多。 ADA4661-2經(jīng)特殊設(shè)計,其功耗極大且不影響失調(diào)漂移性能。
圖6顯示失調(diào)漂移測量值與溫度的關(guān)系。額定性能重現(xiàn)于黑色曲線,并具有低電源電壓與高阻性負載(–1.2 µV/°C)。 紅色曲線顯示120 Ω橋式負載結(jié)果。 值得注意的是,曲線的形狀未發(fā)生改變;它僅僅由于芯片升溫(6.4°C)而向左平移。 藍色曲線顯示電源電壓上升至15 V時的結(jié)果——此時可測量電路的最大功耗。 同樣地,曲線形狀不發(fā)生改變,但由于芯片升溫55°C而向左平移。 內(nèi)部功耗已知(385 mW),因此可計算系統(tǒng)的實際熱阻 (θJA),即143°C/W。 重要的是需考慮工作的環(huán)境溫度范圍。 最大芯片溫度不應(yīng)超過125°C;這意味著對于最差情況負載而言,最大環(huán)境溫度為70°C。
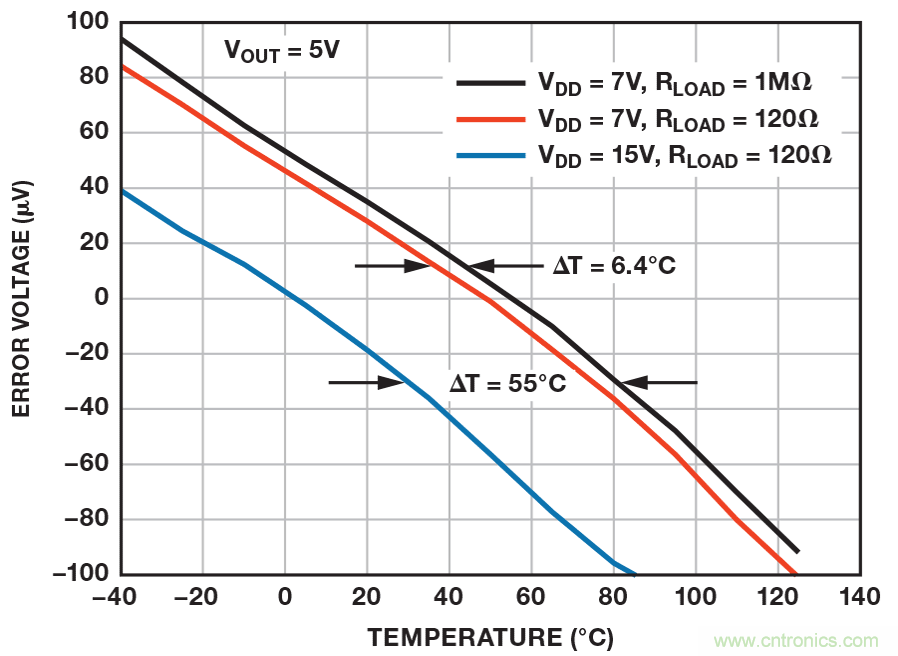
圖6. 誤差電壓與環(huán)境溫度的關(guān)系
瞬態(tài)測量結(jié)果
電路的階躍響應(yīng)是評估環(huán)路穩(wěn)定性的簡便方法。 圖7顯示高電阻電橋在容性負載范圍內(nèi)的階躍響應(yīng)測量值;圖8顯示低電阻電 橋在同樣條件下的測量值。 由于反饋網(wǎng)絡(luò)的極點-零點二聯(lián)效應(yīng) ,該電路的階躍響應(yīng)具有過沖特性。 該二聯(lián)響應(yīng)存在于基波中,因為電路反饋系數(shù)從低頻時的單位增益下降至高頻時的0.13。 由于零點相較極點而言處于更高的頻率,階躍響應(yīng)將始終過沖,哪怕相位裕量遠大于適當值。 此外,二聯(lián)效應(yīng)在電路中具有最大的時間常數(shù),因此趨向于對建立時間產(chǎn)生主要影響。 當采用高阻性負載以及1 nF容性負載時,電路具有最差情況下的穩(wěn)定性以及輸出級振鈴。
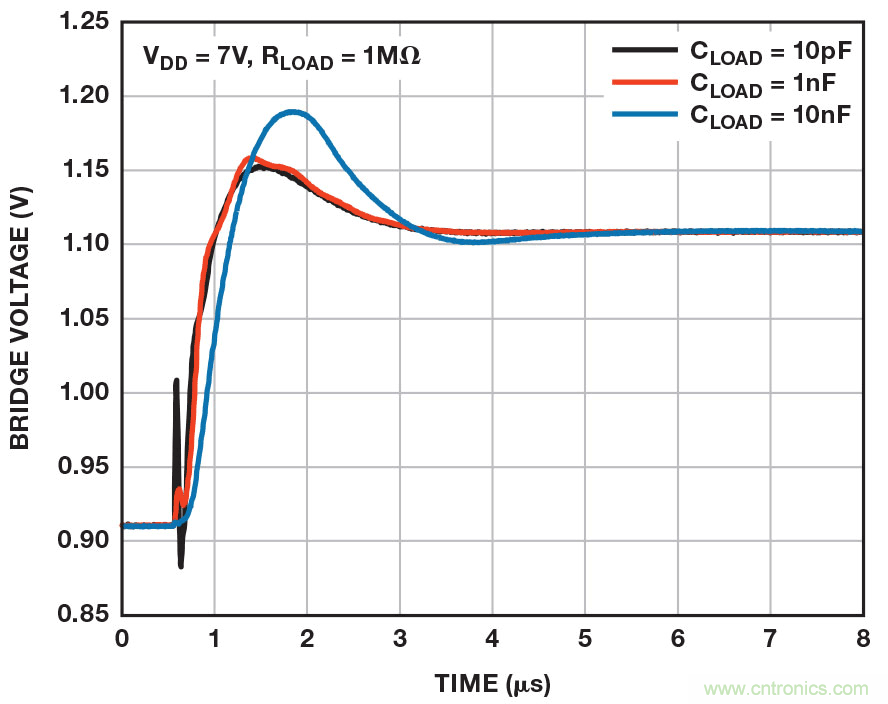
圖7. 無負載階躍響應(yīng)
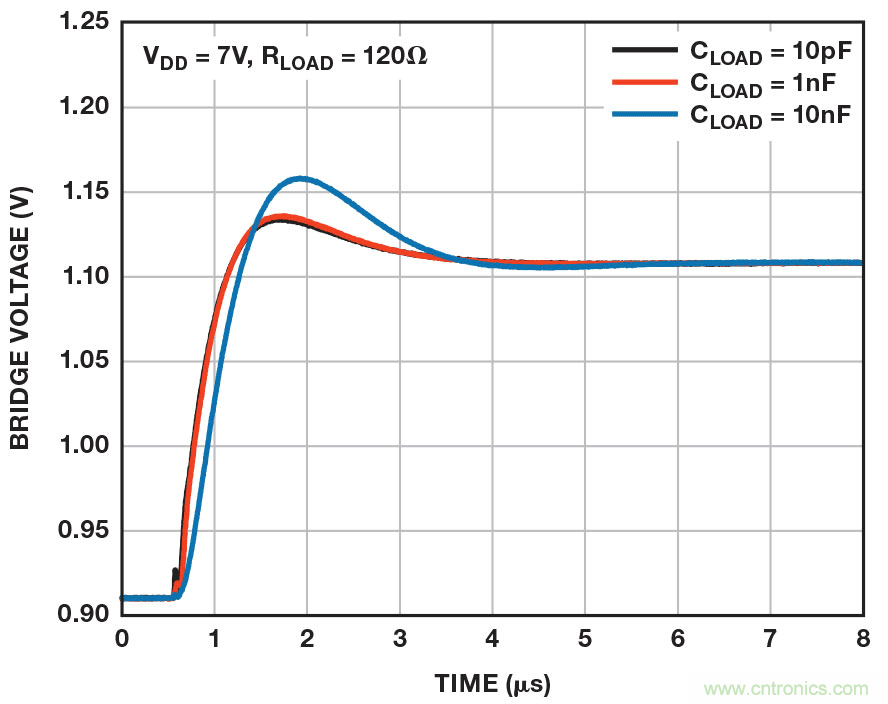
圖8. 有負載階躍響應(yīng)
結(jié)論
本文所示之負載驅(qū)動器電路可為低至120 Ω的阻性負載施加5 V電壓,而總誤差不超過1 mV,并且能穩(wěn)定驅(qū)動高達10 nF總電容。 電路符合其額定性能,并能以7 V至15 V的寬范圍電源供電,功耗接近400 mW。 通過以±7 V電源為放大器供電,該基本電路便可擴展驅(qū)動正負載和負負載。 全部性能通過一個3 mm × 3 mm小型放大器以及四個無源元件即可實現(xiàn)。
推薦閱讀:




